-
- CCC 9 - News Flash
- [概念认可指南]制定通知
- [STS LNG输送作业安全指南] 制定通知
- [2023-ETC-02]发行船舶入级符号AFP-C(EV) Notation技术信息
- 汇报(钢质海船入级规范4篇10张,钢质海船入级规范7篇5张,钢质海船入级规范适用指南8篇7张,制造法和形式认可等相关指南)修订和合并本登记通知
- 汇报(钢质海船入级规范1篇,适用指南7篇附录)修订通知
- 提供2014年1月1日前建造的客船被淹事故后的运行信息
- 更新SOPEP/SMPEP沿岸国家联系方式(2023.10.31.)
- 遵守船舶回收协议(HKC)的注意事项(预计2025.06.26生效)(Rev.1)
- 中国领海船舶使用燃料含硫量限制执行情况
- 在印度海域使用Thuraya、Iridium和类似卫星通信设备-规定
- CCC 9 - News Flash
- [概念认可指南]制定通知
- [STS LNG输送作业安全指南] 制定通知
- [2023-ETC-02]发行船舶入级符号AFP-C(EV) Notation技术信息
- 汇报(钢质海船入级规范4篇10张,钢质海船入级规范7篇5张,钢质海船入级规范适用指南8篇7张,制造法和形式认可等相关指南)修订和合并本登记通知
- 汇报(钢质海船入级规范1篇,适用指南7篇附录)修订通知
- 提供2014年1月1日前建造的客船被淹事故后的运行信息
- 更新SOPEP/SMPEP沿岸国家联系方式(2023.10.31.)
- 遵守船舶回收协议(HKC)的注意事项(预计2025.06.26生效)(Rev.1)
- 中国领海船舶使用燃料含硫量限制执行情况
- 在印度海域使用Thuraya、Iridium和类似卫星通信设备-规定
-
- CCC 9 - News Flash
- [概念认可指南]制定通知
- [STS LNG输送作业安全指南] 制定通知
- [2023-ETC-02]发行船舶入级符号AFP-C(EV) Notation技术信息
- 汇报(钢质海船入级规范4篇10张,钢质海船入级规范7篇5张,钢质海船入级规范适用指南8篇7张,制造法和形式认可等相关指南)修订和合并本登记通知
- 汇报(钢质海船入级规范1篇,适用指南7篇附录)修订通知
- 提供2014年1月1日前建造的客船被淹事故后的运行信息
- 更新SOPEP/SMPEP沿岸国家联系方式(2023.10.31.)
- 遵守船舶回收协议(HKC)的注意事项(预计2025.06.26生效)(Rev.1)
- 中国领海船舶使用燃料含硫量限制执行情况
- 在印度海域使用Thuraya、Iridium和类似卫星通信设备-规定
替代燃料技术研究组
RO Gilltae首席
KIM Kyunghwa责任
PARK Kido责任
MOON Changjae先任
目前,KR替代燃料技术研究组正在执行产业通商资源部的“为扩大燃料电池系统应用领域开发移动运行模式”国家研究开发课题。
由于造船海运行业对运行模式开发的研究不足,可以将目前仍在积极研究中的汽车行驶模式概念应用到船舶上,但由于汽车和船舶的运用环境差异,直接适用有些吃力。
因此,需要开发适合船舶的运行模式导出方法和代表性运行模式生成方法论,为此首先需要开发适用于汽车行业的5-cycle校正式的FTP(Federal Test Procedure)-75模式(市内运行模式)、对HWFET(HighWay Fuel Economy Test)模式(高速公路行驶模式)及汽车行驶模式生成方法和韩国海洋大学实习船“汉朝”号的釜山-马山-釜山港车进行了比较和分析
图1、2是汽车的FTP-75、HWFET模式速度轮廓图,图3是实习船的速度和输出轮廓图。
|
|
图1.FTP-75模式速度配置文件 | 图2.HWFET模式速度配置文件 |
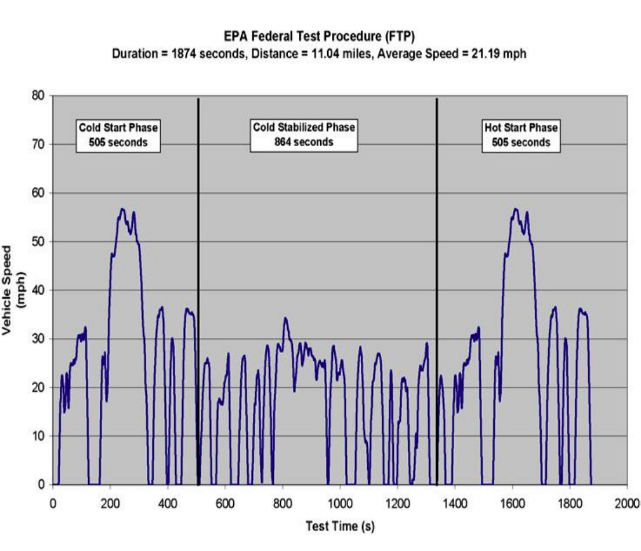
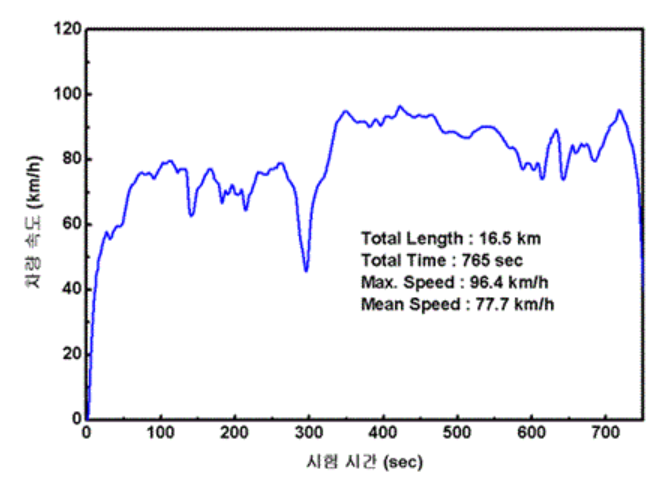
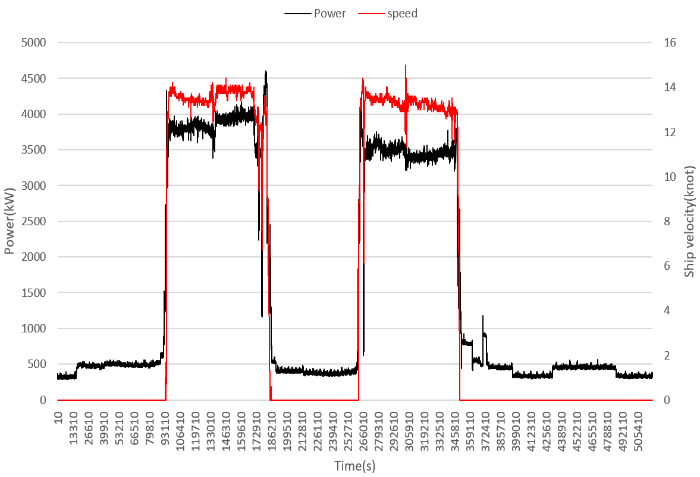
图3. FTP-75模式速度配置文件
下表1显示了汽车的FTP-75模式、HWFET模式和船舶的出港模式(釜山)、Ocean-going模式的RPA、PKE。RPA和PKE被用作行驶动力学分析的参数,RPA、PKE值越大,表明动态变化越大。相关式等于式1,2。
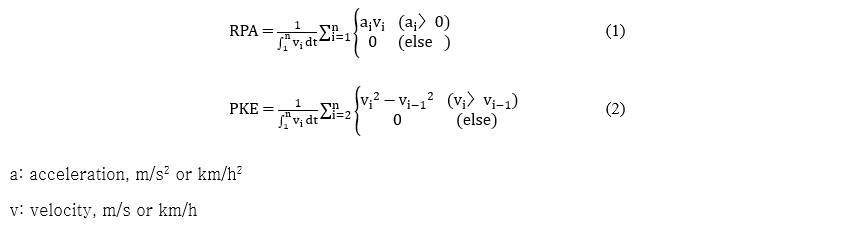
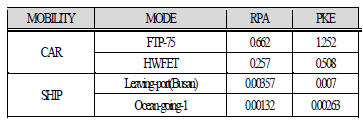
表1.船舶和汽车的模式RPA、PKE
如表1所示,对于汽车,确认FTP-75模式比HWFET模式显示RPA和PKE更大。也就是说,FTP-75模式的负载波动性高于HWFET模式。
以船舶为例,确认RPA和PKE的出港模式(釜山)大于Ocean-going-1模式,出港模式(釜山)的负载波动性高于Ocean-going-1模式。特别是出港模式(釜山)在急剧加速到航行速度的90%后逐渐加速,而Ocean-going-1模式则以一定的速度为基准上下发生了渐进式的变动,因此RPA和PKE值发生了相当大的差异。
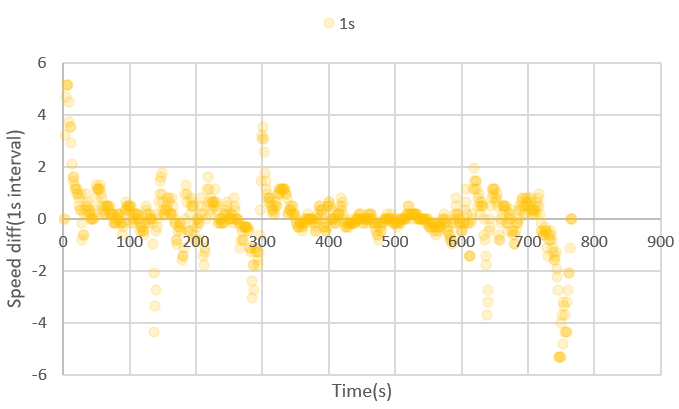
图4、5显示了FTP-75模式(市内行驶模式)和HWFET模式(高速公路行驶模式)的速度倾斜分布图。FTP-75模式表现出了比HWFET模式更大的分散性,这部分可以看作是FTP-75模式下与动态运动相关的加速和减速次数比HWFET模式多。
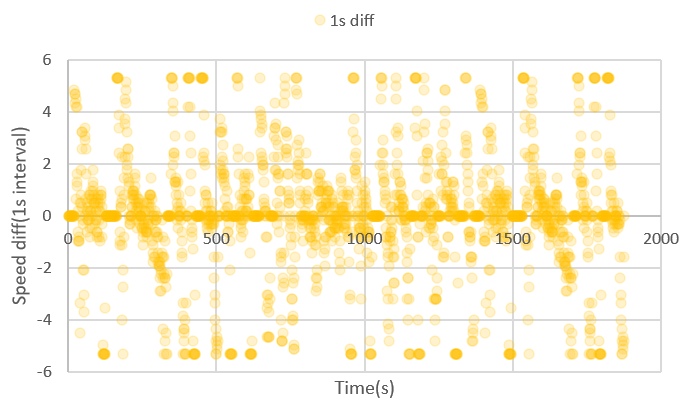
图6、7显示了实习船典型运行模式中2种(出港模式(釜山)、Ocean-going-1模式)的输出倾斜散布图,间隔10秒和30秒。在出港模式(釜山),点以y=0为基准分散,而在Ocean- going-1模式下,点靠近y=0。由此可以确认出港模式(釜山)比Ocean-going-1模式更动态。
|
|
图4.FTP-75模式速度倾斜散布图 | 图5.HWFET模式速度倾斜散布图 |
|
|
图6.出港模式(釜山)输出倾斜散布图 | 图7.Ocean-going-1模式输出倾斜散布图 |
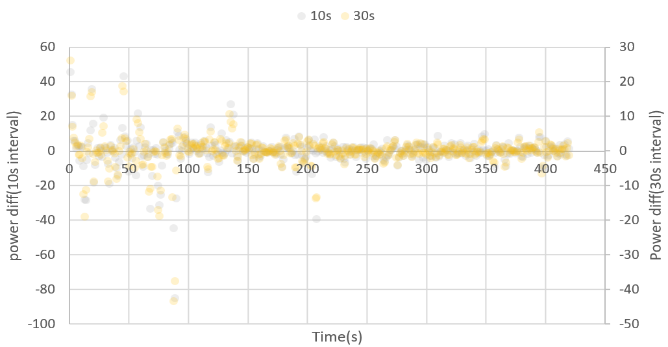
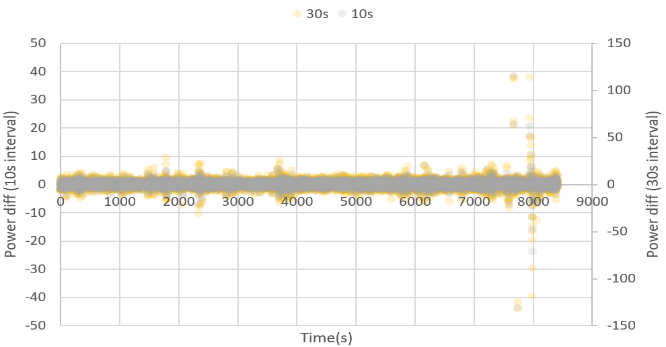
图8显示了FTP-75模式的最大航速10等分后各航速区间的比例。每个速度区间的比例分布均匀,没有偏倚,这意味着由于FTP-75模式有很多ITI(Idle to Idle) cycle,所以速度区间的比例分布均匀。
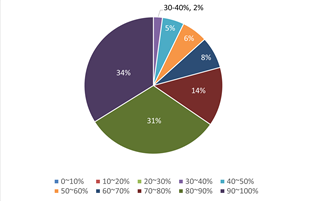
图9显示了HWFET模式的最大速度10等分后各速度区间的比例。在HWFET模式下,70-100%的速度区间占大部分(81%),这意味着汽车从HWFET模式的开始到最大速度附近急剧加速,然后接近最大速度,连续保持大部分速度,在HWFET模式的最后部分急剧减速。
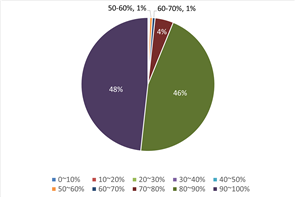
图10显示了出港模式(釜山)的最大功率10等分后各负载区间的比例。从出港模式(釜山)可以看出,70-100%的负荷区间占大部分(79%)。这些部分意味着实习船的功率从出港模式(釜山)的开始部分急剧上升到最大功率附近,然后逐渐上升。
图11显示了Ocean-going-1模式的最大输出功率10等分后各负载区间的比例。在Ocean-going-1模式下,80-100%的负载区间占大部分(94%),这意味着实习船在Ocean-going-1模式下接近最大输出,持续保持输出。
对汽车的FTP-75模式、HWFET模式和船舶的出港模式(釜山)、Ocaen-going-1模式进行比较和分析的结果显示,各模式的负荷分布、加速区间等特性不同,因此为了最终开发出基于概率的代表性运行模式,必须从运行配置文件中区分运行模式,才能实现定速、加速、可以得出根据减速发生概率得出代表性运行模式的结论。
|
|
图8.FTP-75模式下一定负载区间的百分比分布 | 图9.HWFET模式下一定负载区间的百分比分布 |
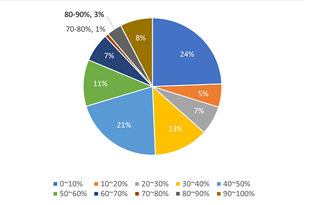
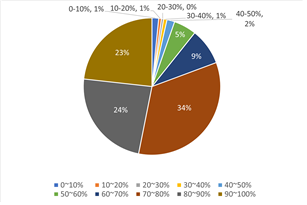
|
|
图10.出港模式(釜山)一定负荷区间的百分比分布 | 图11.Ocean-going-1模式下一定负载区间的百分比分布 |
本研究基于汽车行驶模式的概念,开发了如图12所示的行驶模式导出算法。
另外,为了开发适用于船舶的基于概率的运行模式生成方法论,通过船舶和汽车的比较和分析,引入了行驶模式中不存在的几个概念(y-axis value选定、单位运行配置文件概念、根据船舶功能区分的方法等)。
首先要决定运行模式的目的,决定是为了测量燃油效率还是为了船舶设计然后得出运行模式。选择船舶种类及运行路线和y轴值(船速或功率),从船舶获取相关数据后进行前处理。
之后可以根据船舶功能、船速、功率、ELA等标准,从收集的运行配置文件中导出运行模式。作为示例,将实习船的运行剖面选定为燃油效率测定模式及南海近海区域(Group 1),并以船舶、船速、功率、ELA(Electric Load Analysis Table)标准进行分析,得出了运行模式。
在进出港模式内,将航速分为零但功率变化的部分和航速不为零而功率变化的部分,并导出了停泊模式、航行中急加速模式、航行中急减速模式、Ocean-going模式。得出的运行模式类型如表2所示,各运行模式的主发动机功率、发电机功率、总功率(主发动机+发电机)、船速简介如图13所示
○ 实习船运行模式名称及种类
燃油效率测定用– 实习船- Group1(釜山-马山-釜山 航次)
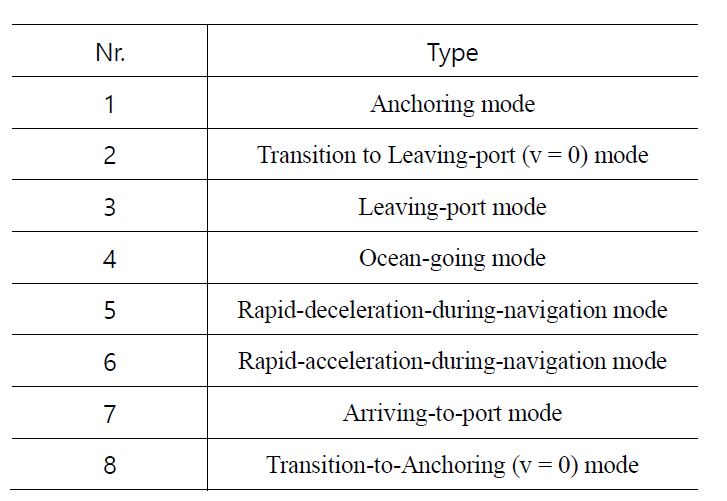
表2. 实习船运行模式
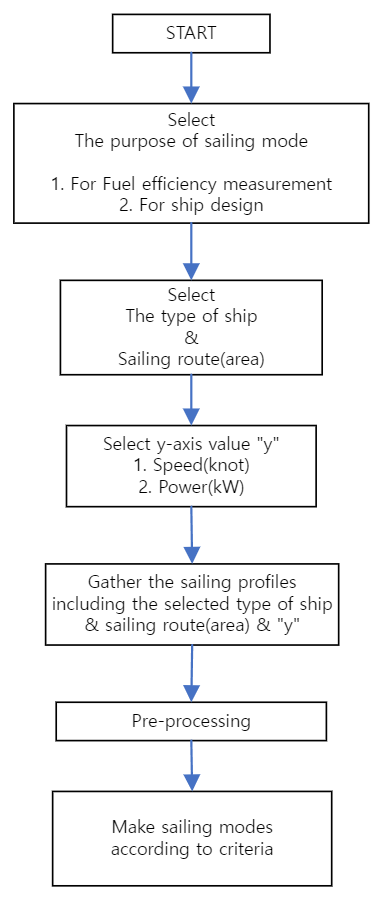
图12. 船舶运行模式导出算法
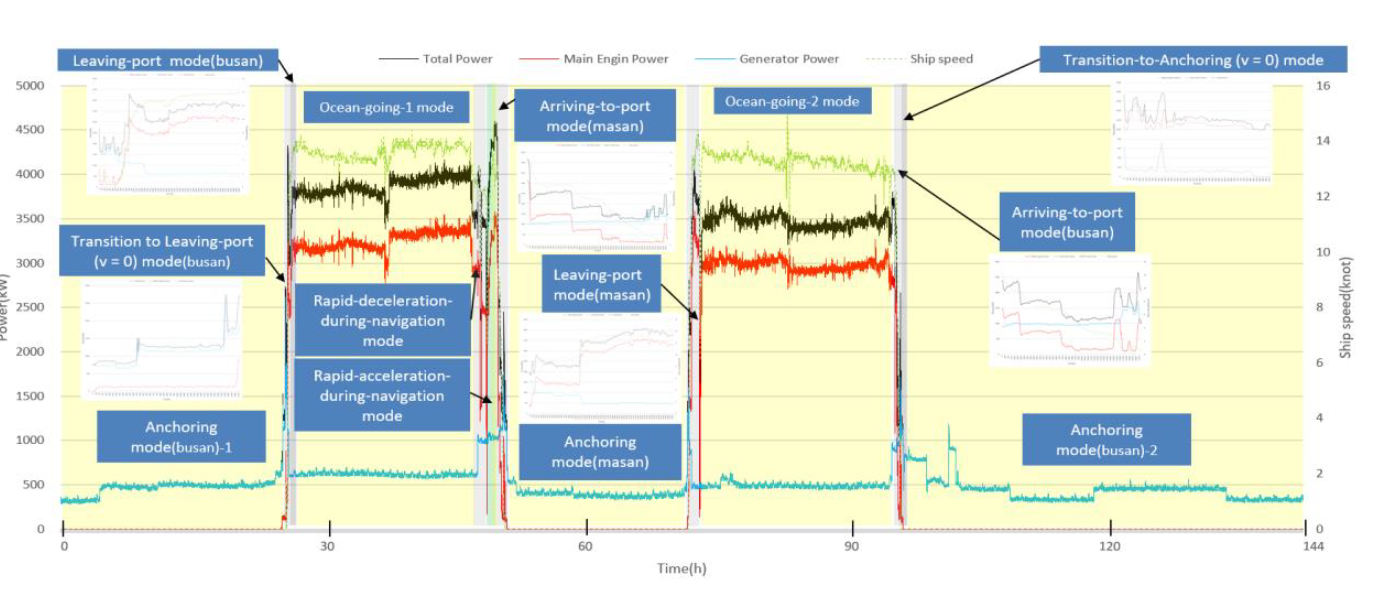
图13. 使用MCMC创建代表性运行模式
根据上述运行模式导出算法,从运行配置文件导出运行模式后,需要生成代表性运行模式。参照汽车行驶模式生成方法论,汽车行驶模式生成方法论包括分析实际道路行驶模式、重新构建速度分布的方法、利用麦克风的传统方法、虽然有使用k-means集群的方法等多种方法,但对于船舶运行模式,最适合使用MCMC(Markov Chaing Monte Carlo)的基于概率的运行模式生成方法。
如下图14所示,通过基于概率的航运模式生成方法论,将特定船种及航运车辆的多个航运配置文件导出为一个代表性航运模式,该方法论的核心是MCMC(Markov Chain Monte Carlo)算法。
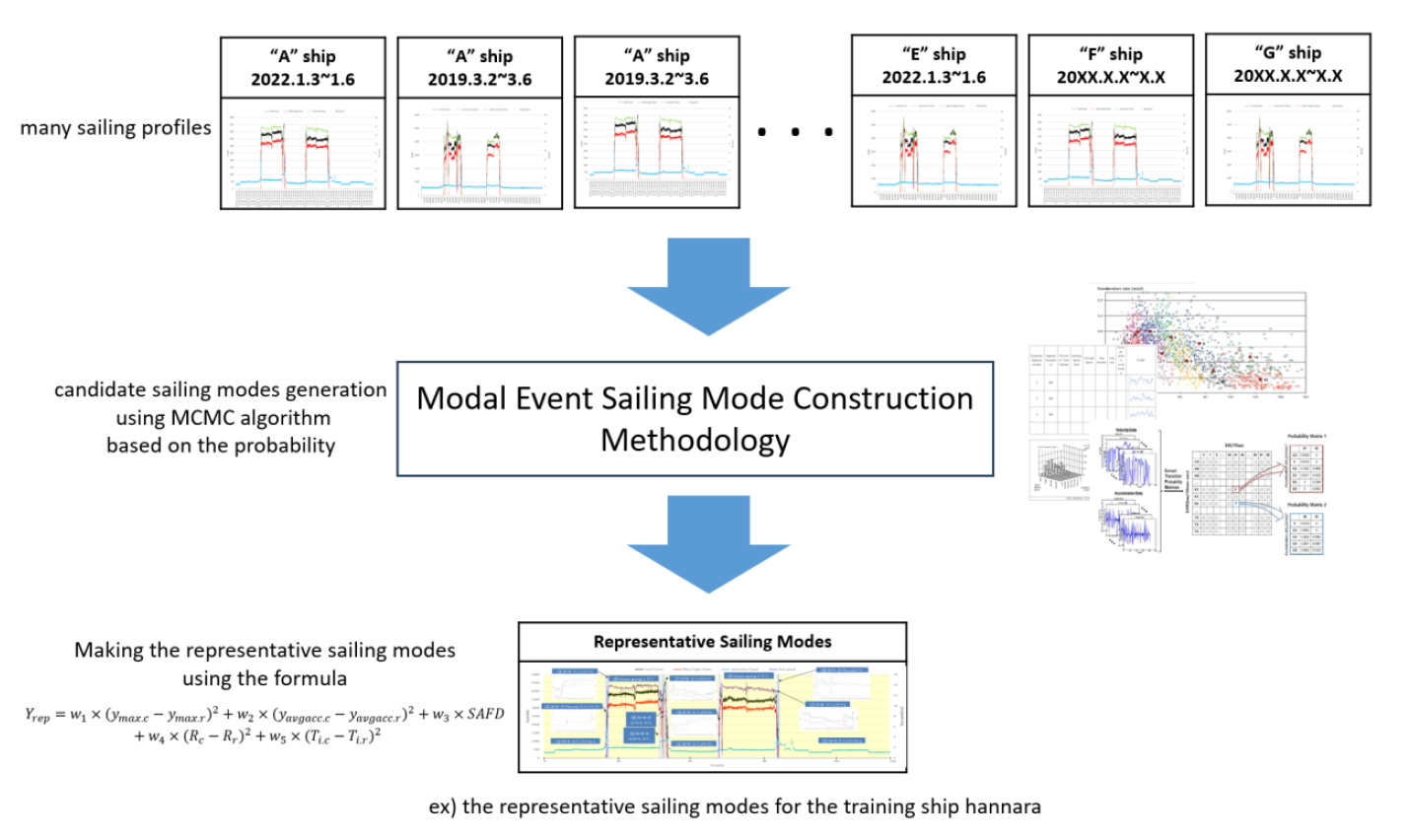
图14.使用MCMC创建代表性运行模式
Markov Chain是一个具有马尔可夫性质的离散概率过程,从某种状态过渡到另一种状态时,就是只受前一阶段状态影响的概率过程。由于未来与过去无关,只受前一个时间点的影响,因此适合生成船舶运行模式,可以如下式3所示。
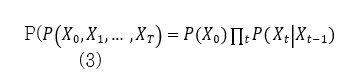
目前,KR已经完成了利用MCMC基于概率的代表性运行模式生成方法的开发和矩阵建模,今后将从客船、集装箱船运行配置文件中生成代表性运行模式。本研究结果不仅可以用于实习船,还可以用于其他船舶,可以作为以概率为基础的代表运行模式开发方法论的基础资料,将多个船舶拥有的各种运行剖面导出为一个代表运行模式。
此外,针对特定水域和航线得出的代表性运行模式有望用于新船舶的优化系统设计和具有多种运行剖面的船舶的标准化燃油效率测量。